 |
|||||
| Pro fotografování
hvězdné oblohy je ve většině případů (deep sky
objekty) potřeba pořizovat snímky s expoziční dobou v
řádech sekund až desítek minut. V těchto případech
je potřeba vést snímací
zařízení (dalekohled s fotoaparátem či CCD kamerou
v ohnisku, teleobjektiv s fotoaparátem, ...) v průběhu
celé expozice s poměrně velkou přesností (přesnost
závisí hlavně na ohniskové vzdálenosti
objektivu snímacího dalekohledu či teleobjektivu).
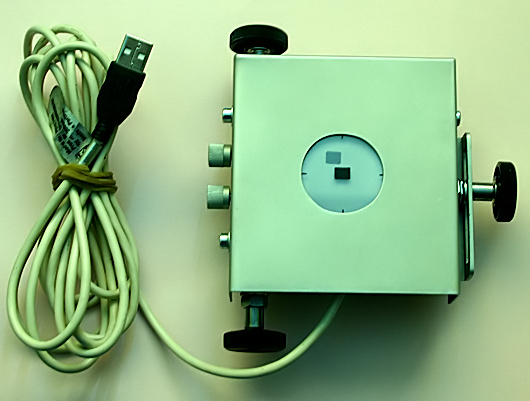
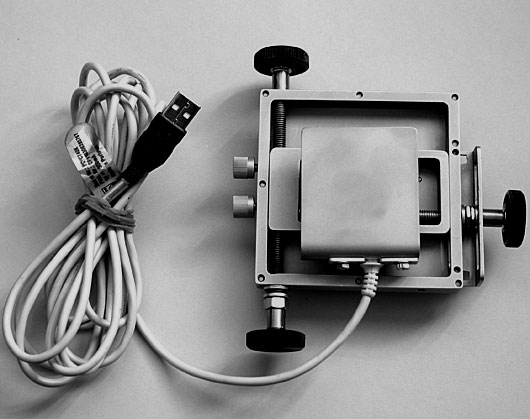
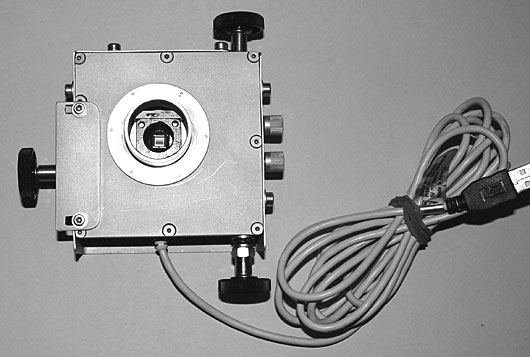
Já k tomuto účelu používám autopointer z
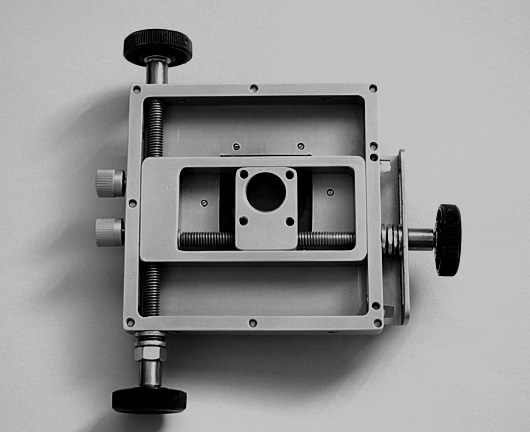
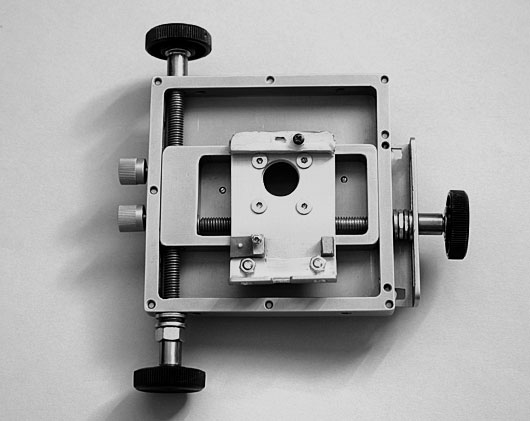
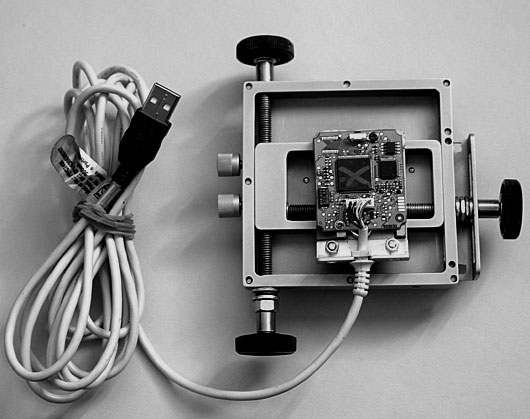
citlivé webové kamery Philips ToUcam Pro. Jak to funguje? Na montáži mám dva dalekohledy. Jeden hlavní, v jehož ohnisku je fotoaparát a druhý (tzv. pointační), který má v ohnisku čip webové kamery (viz obrázek). Webová kamera snímá obraz (hvězdné pole) z pointačního dalekohledu a posílá tento obraz do počítače (v mém případě do notebooku). V počítači se obraz zpracovává k tomu určeným softwarem (na internetu je možno nalézt mnoho programů pro tento účel, já používám program Autoguider Martina Myslivce. Program vyhodnocuje pozici zvolené pointační hvězdy a v případě, že zaregistruje odchylku od ideálního stavu (způsobenou např. nepřesným chodem pohonů montáže, špatně ustavenou montáží, ...), tak vyšle korekční signál k motorům montáže (přes vhodný kabel; elektronika montáže musí mít vstup pro autoguider) a vrátí tak pointační hvězdu (obraz hvězdy) na správné místo na senzoru webkamery (tím pádem i na správné místo na hlavním snímacím zařízení- senzor digitálního fotoaparátu či film). Této činnosti se říká pointace- snaha udržet snímaný objekt v průběhu celé expozice na stále stejné pozici na filmu či čipu digitálního fotoaparátu. Pokud by se toto neprovádělo, tak na výsledném snímku nebudou hvězdy bodové, ale budou vypadat např. jako různě dlouhé "čárky" (délka čárky závisí na velikosti odchylky v přesnosti pointace), nebo můžou mít hvězdy i jiné tvary (pokud to "ujede" ve více směrech, jako např. zde). Pro použití webové kamery jako autoguideru jsem musel elektroniku kamery umístit do vhodné krabičky zakončené tubuskem o standardním průměru 1.25" (podle okulárového výtahu). Výsledek je vidět na prvním obrázku. V mém případě, kdy mám pointační dalekohled připevněný napevno k hlavnímu dalekohledu může občas nastat situace, že při snímání určitého objektu se v obraze webové kamery (čip kamery je velmi malý, pár čtverečních milimetrů) nemusí nacházet vhodná pointační hvězda- pointační dalekohled míří do místa na obloze, kde se prostě žádná dostatečně jasná hvězda nenachází. Proto jsem si vyrobil přípravek (inspiroval jsem se zde), pomocí kterého mohu čipem kamery pohybovat v celém rozsahu zorného pole pointačního dalekohledu, a tím nalézt vhodnou pointační hvězdu bez nutnosti měnit kompozici zamýšleného snímku. Jak to funguj je snad jasné z přiložených obrázků. Na zadní straně přípravku mám okénko, kde mohu sledovat pozici čipu kamery vzhledem k zornému poli (viz horní obrázek). Použitá webová kamera je poměrně citlivá, nejslabší hvězda, pomocí které jsem pointoval měla 9.4 mag a vůbec nejslabší spatřená hvězda na displeji notebooku měla 10.5 mag (pointační dalekohled Newton 100/600) |
|||||
 |
 |
 |
 |
 |
 |
{kind=link}
{kind=link}